


 English
English 简体中文
简体中文
The Flexibility Argument That Rail Systems Cannot Answer
The fundamental limitation of rail-guided transport systems is the rail itself. A rail system defines a fixed path that cannot be changed without construction work: adding a new route, bypassing a blocked section, or responding to a layout change requires physical modification of the infrastructure. This limitation is acceptable in facilities where the transport requirements are stable and the facility layout is permanent. But in facilities where production volumes change, product mixes shift, and layout modifications are frequent—the conditions that define flexible manufacturing—the inflexibility of rail systems becomes a significant operational liability. Rail-less carts solve this problem by eliminating the rail, trading the precision of guided operation for the flexibility of free movement.
What Rail-less Actually Means in Practice
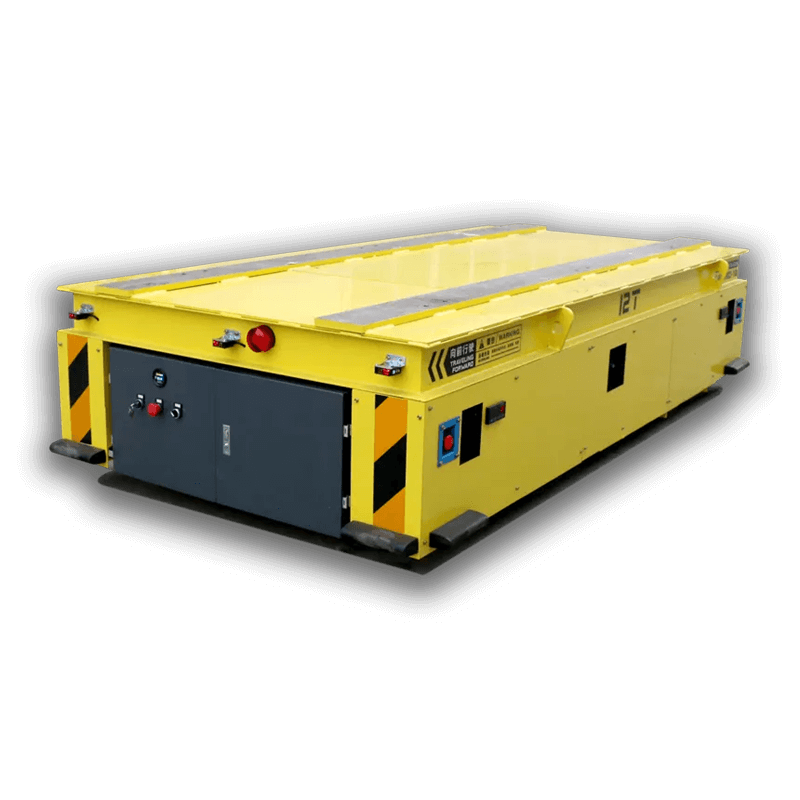
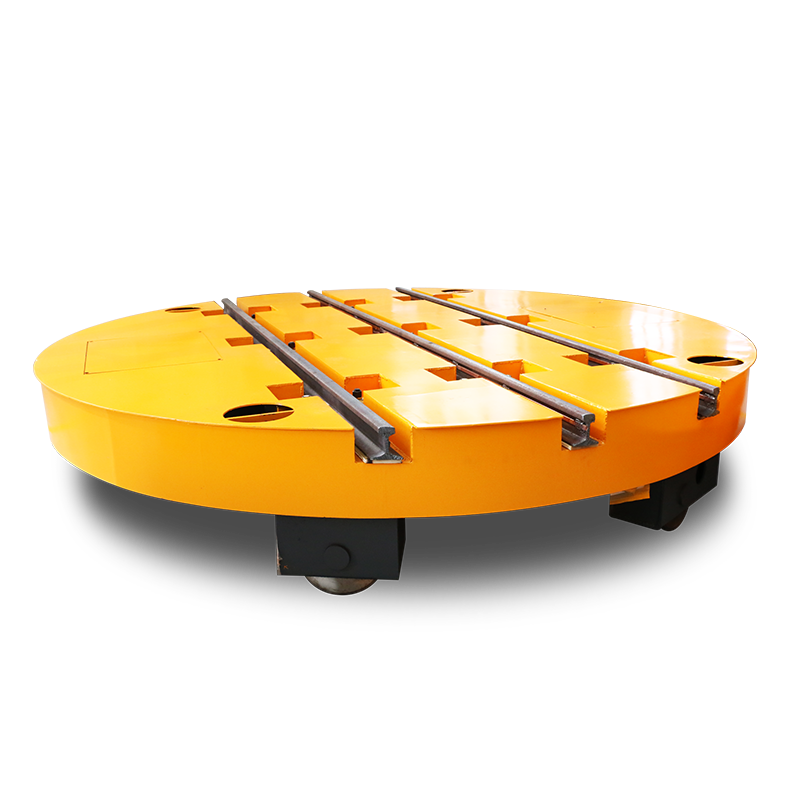
Rail-less carts are not simply carts without rails—they are carts with alternative navigation technologies that enable them to operate without fixed guide paths. The most common navigation approaches for rail-less electric transfer carts are: operator-controlled (human-driven like a cart or forklift), wire-guided (following a wire embedded in the floor that is not physically constraining), and autonomous navigation using sensors, magnets, or pre-mapped routes. Each approach provides a different level of path flexibility and automation, and the appropriate choice depends on the application requirements.
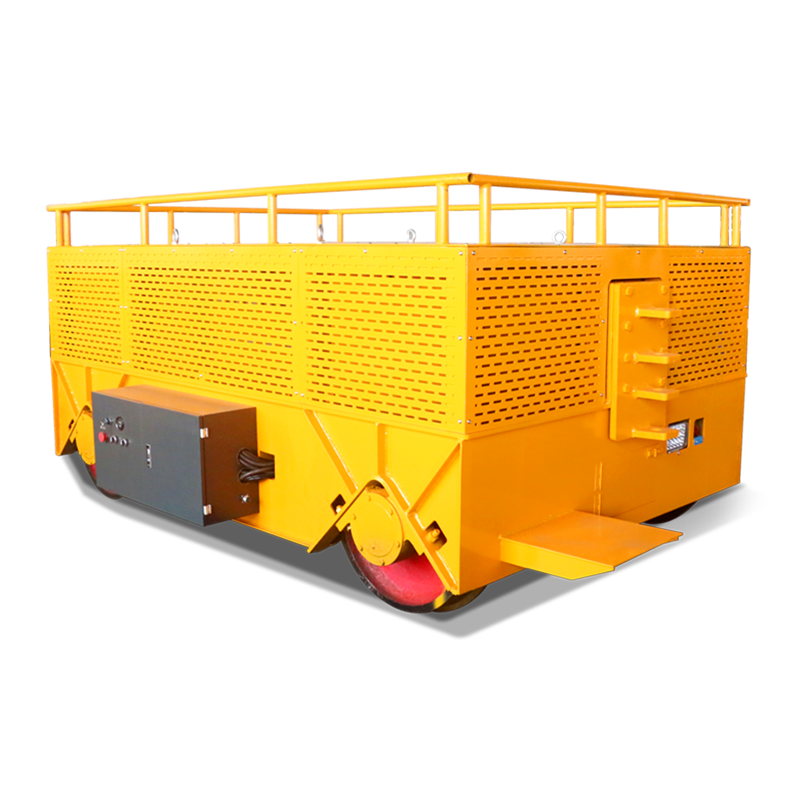
Operator-controlled rail-less carts are the simplest implementation: a person drives the cart along the required route, using their judgment to navigate around obstacles and adjust to changing conditions. This approach is appropriate for low-to-medium volume transport tasks where a dedicated operator is available, where routes change frequently, and where the transport tasks are too variable to automate. The limitation is that operator-controlled carts require labor for every transport movement, which makes them expensive for high-volume applications.
Wire-guided systems use a wire embedded in the floor—similar to the guide wire used in some robotic vacuum cleaners—to provide path guidance. The cart follows the wire automatically without operator input, but unlike rail systems, the wire can be relocated if the route needs to change. Relocating a wire-guided path requires cutting the floor, laying new wire, and reconnecting—more involved than changing a software route but far less involved than installing new rail. Wire-guided systems are appropriate for stable routes in facilities that may need to change routes occasionally but not frequently.
Flexible Manufacturing: Where Rail-less Carts Deliver Their Greatest Value
Flexible manufacturing systems are defined by their ability to produce a variety of products on the same equipment, with changeover between products achieved through software or minimal physical reconfiguration rather than extensive equipment modification. The material transport system in a flexible manufacturing environment must be equally flexible: it must be able to transport different products, between different locations, on routes that may change as the production mix changes. A rail system with fixed routes cannot provide this flexibility, which is why rail-less carts have become the material transport solution of choice for flexible manufacturing environments.
The specific transport requirements that define flexible manufacturing and drive the choice of rail-less carts include: high product variety with frequent changeovers, requiring transport routes to be reconfigured as production schedules change; production volumes that vary by product, requiring the transport system to scale capacity up or down without infrastructure changes; cell-based production layouts where work moves between stations within a cell, with the cell layout potentially changing as products change; and new product introductions that require new transport routes to be established quickly to connect new production cells with existing material flow networks.
Autonomous Rail-less Carts: The Smart Flexibility Choice
Autonomous rail-less carts—self-guided electric transfer carts that navigate without an operator and without fixed rail or wire infrastructure—represent the most advanced application of rail-less cart technology. These carts use a combination of sensors (laser scanners, ultrasonic sensors, cameras), pre-mapped route data, and real-time obstacle detection to navigate autonomously through the facility. They can follow programmed routes, avoid obstacles, prioritize traffic, and integrate with production scheduling systems. The navigation software runs on-board the cart, and route changes are implemented by updating the cart's route map rather than by modifying physical infrastructure.
The operational benefits of autonomous rail-less carts in flexible manufacturing are significant. Routes can be changed in software within hours—no floor work, no wire installation, no rail modification. Multiple carts can operate in the same space, coordinating with each other through their shared navigation system to avoid collisions and optimize traffic flow. Carts can respond dynamically to transport demand, adjusting their routes and priorities based on real-time production requirements rather than following fixed schedules. And the data generated by autonomous cart operations—transport volumes, route utilization, cycle times, exception events—provides visibility into the material flow that enables continuous improvement of the transport system.
Implementing Rail-less Carts in an Existing Flexible Manufacturing Facility
Implementing rail-less carts in an existing flexible manufacturing facility typically requires addressing infrastructure conditions that were designed for the previous transport method. The most common infrastructure issues are: floor surface condition (autonomous rail-less carts require smooth, clean floors for reliable sensor operation); lighting conditions (some navigation systems are sensitive to lighting variations that do not affect human operators); wireless network coverage (autonomous carts require reliable WiFi or dedicated network coverage throughout the operating area); and charging infrastructure location (carts need to return to charging stations periodically, and the location of charging stations affects route efficiency).
The transition from a rail-guided or operator-controlled system to autonomous rail-less carts is typically phased. The first phase maps the facility and establishes the initial route network while the existing transport system continues to operate. The second phase introduces autonomous carts on a limited number of routes, validating the navigation and traffic coordination systems while the existing system handles the remaining transport volume. The third phase expands the autonomous cart fleet and transfers routes from the legacy system as confidence builds. This phased approach manages the operational risk of the transition while enabling the facility to realize the flexibility benefits of rail-less carts incrementally.