


 English
English 简体中文
简体中文
The Drive System: The Core Technology That Determines Cart Performance
The drive system of an electric flatbed cart—the combination of motor, controller, power transmission, and wheels—is the core determinant of the cart's performance characteristics: how fast it accelerates, how much load it can move, how precisely it can be positioned, how efficiently it uses battery energy, and how reliably it operates over its service life. Understanding the options available in each drive system component, and how the components interact with each other, is essential for selecting the right cart for a given application and for operating and maintaining it effectively.
AC Motors vs. DC Motors: The Fundamental Architecture Choice
The choice between AC and DC motor technology is the foundational drive system decision, and it has implications that extend through every other aspect of cart performance. DC motor systems—the traditional technology in industrial electric vehicles—use a DC motor paired with a controller that varies the voltage applied to the motor to control speed. AC motor systems use a three-phase AC motor paired with a variable frequency drive (VFD) that converts DC battery power to variable-frequency AC for motor control.
AC motor systems have come to dominate new electric cart design because of their advantages in efficiency, reliability, and control precision. AC motors have no commutator or brushes—the components in DC motors most subject to wear—making them significantly more reliable and requiring less maintenance. AC drive systems also provide better speed control characteristics: the VFD can control motor speed precisely across a wide range without the speed-torque limitations that constrain DC systems. At low speeds, DC motors generate less torque per amp of current than at their rated speed, which can make them sluggish at low speed; AC motors maintain full torque capability across their entire speed range.
Regenerative Braking: Converting Motion Back to Energy
Regenerative braking is a feature of electric drive systems that captures the kinetic energy of the moving cart during deceleration and converts it back to electrical energy that is returned to the battery. This conversion has two benefits: it reduces the energy consumed during braking, which improves overall energy efficiency, and it reduces the wear on the mechanical braking system, extending brake component life. The amount of energy recovered depends on the frequency of braking events and the mass of the loaded cart; carts operating on routes with frequent stops recover significantly more energy than carts on continuous-run routes.
The effectiveness of regenerative braking is limited by the battery's ability to accept charge. A battery that is fully charged cannot accept additional charge, so regenerative braking is most effective when the battery state of charge is below approximately 80%. Battery temperature also affects the charging acceptance—cold batteries accept less charge than warm batteries, which is why regenerative braking efficiency is lower in cold facilities or during cold starts. The regenerative braking system should be designed with these limitations in mind, and the operational scheduling of charging events should account for the relationship between battery state of charge and regenerative braking effectiveness.
Four-Wheel Drive and Independent Wheel Drive: When More Motors Make Sense
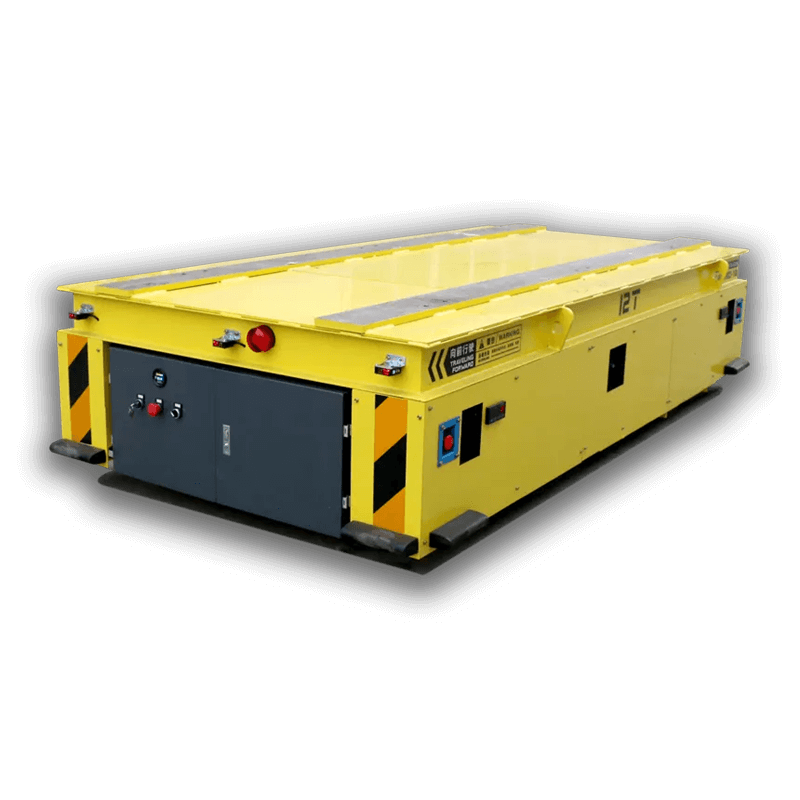
Most electric flatbed carts use a single drive motor powering two wheels through a mechanical differential, similar to the rear-wheel drive arrangement in conventional automobiles. This arrangement is adequate for most applications but has limitations in high-load, high-precision, or adverse-condition operation. Four-wheel drive and independent wheel drive configurations address these limitations.
Four-wheel drive configurations use two drive motors, one powering the front axle and one powering the rear axle, providing traction on both ends of the cart. This is valuable in applications with variable floor conditions—areas with wet floors, ramps, or surfaces with reduced traction—where a single drive axle might lose traction while the other still has grip. Independent wheel drive goes further: each wheel has its own motor and controller, and the control system varies the torque to each wheel independently. This arrangement provides the highest level of traction control and the most precise steering response, but at significantly higher cost and complexity than single-motor configurations.
Steering Systems: From Manual to Electronic Control
The steering system converts the operator's steering input into wheel angles that direct the cart's path. The simplest steering system—mechanical steering, where a steering wheel is connected directly to the wheel knuckles through a mechanical linkage—requires the operator to provide physical effort to turn the wheels and does not provide any assistance or speed-dependent steering ratio control. Power steering systems add a hydraulic or electric power assist that reduces the operator effort required for steering. Electronic steering systems replace the mechanical linkage with electronic position sensors and electric actuators, providing precise control over wheel angle at any speed.
Electronic steering is the enabling technology for many of the advanced positioning capabilities of modern electric flatbed carts: precise positioning at exact coordinates, automated path following along programmed routes, and automatic steering correction to maintain straight-line travel. Electronic steering systems can be programmed with different steering ratios at different speeds—quick steering response at low speed for maneuvering in tight spaces, reduced responsiveness at high speed for stable straight-line travel—without any mechanical modifications. The primary disadvantage of electronic steering is its higher initial cost and its dependence on electronic components that require specialized diagnostic tools and technicians.
Integration with Fleet Management Systems
Modern drive systems generate extensive data about cart operation: motor current draw, wheel speed, battery state of charge and charge acceptance, regenerative braking energy recovered, fault codes and diagnostic data, and operator inputs through the steering and acceleration controls. This data is available through the CAN bus—the controller area network that connects the drive system components—and can be read by fleet management systems that aggregate and analyze the data across the cart fleet.
The value of drive system data goes beyond monitoring individual cart performance. Fleet-level analysis of drive system data reveals patterns that individual cart inspection cannot: carts that consistently operate at higher motor currents than their peers may have drivetrain problems developing; routes that consistently show higher energy consumption than others may have slope or surface conditions that could be addressed; operators whose carts consistently show harsh braking patterns may benefit from additional training. The integration between the drive system and the fleet management system is what enables these insights, and it is what distinguishes a connected electric cart fleet from a collection of individual vehicles operating without coordination or data analysis.